

行业百科
xingyebaike
在冲压件的自动生产中,机器人第七轴和机械手搬运设备统称为自动设备。七轴机器人和机械手的现场安装方法明显不同。那么如何在现场调试机器人的第七轴呢?

(1) 行走机构就位后,依次松开垫块与底座连接的张紧螺栓和顶升螺栓,直至垫块与地面接触牢固平整;
(2) 根据垫块上的脚孔在地面上钻膨胀螺栓孔。孔深与螺栓长度相同,然后将膨胀螺钉一起放入孔中;
(3) 粗调平:将行走装置移动到导轨的中间位置。首先,移动装置两侧八块底板上的顶起螺栓被压在垫块上,但力不会持续。将两个水平仪放置在移动装置的平面上,一个纵向,一个横向。观察纵向和横向的水平情况,选择四个方向中的最高点作为基准,从最低点开始调平,然后使用其他点进行微调;
(4) 精调平和调平后的检查,在导轨上平均选择5-8点,标记相应的位置,准备坐标纸,将行走装置停在第一点,将两个水平分别放在垂直和水平方向上,取适当的参考刻度作为零点,在坐标系中标记与第一个位置的水平和垂直坐标对应的点,然后移动到第二个位置进行相同的操作,直到所有点的测量完成,将所有点的位置连接在坐标纸上,观察峰谷趋势以及峰谷极值之间的差异,精细调平峰谷位置,使曲线平缓,峰谷差在要求的公差范围内,然后在相应位置测量并记录。每个位置的记录完成后,返回每个位置,查看读数是否变化,如果几乎没有变化,则表明调平成功。拧紧张紧螺栓后,检查位置,确保水平没有变化;
(5) 按图纸和线条安装拖链挡板支撑架、挡板和拖链移动端的支架,将拖链放入挡板中,并按相应位置固定;
(6) 将机器人第七轴安装在行走单元上,通过拖链将相应的电缆连接到机器人上,将第七轴行走电机安装在减速器上并连接,进行机器人的调试。然后,整个机构应静止24小时,并再次测量水平,以查看水平是否受到地面和负载的影响;
(7) 如果在调平过程中多次尝试后发现仍难以调平,则在运输或安装过程中,两段导轨的连接位置可能会变形。此时,需要松开两段的连接以进行调平操作。找平后,紧固螺栓并用0.02mm塞尺检查,以确定导轨拼接表面之间的间隙以及导轨与底座之间的间隙小于0.02mm。
本文详解自动化生产线龙门智能桁架全套保养流程,包含定期点检标准、链条轴承润滑方案、设备防锈处理、智能系统故障自查、维保台账记录规范,适用于数控加工、自动化上下料龙门桁架设备运维。
![]() 2026-07-08
2026-07-08
本文结合康佛森原厂标准,详解堆垛机单电机双向伸缩货叉分级维保周期,涵盖日检、周保、月检、年检全流程,梳理传动、耐磨、电控三大类易损件清单及更换准则,规范设备维保操作,有效解决货叉卡顿、定位偏移等问题,助力仓储设备稳定运行。
![]() 2026-06-23
2026-06-23
制药、半导体无尘车间选购洁净天车不能只看吨位,需要对照 ISO14644 洁净等级、防漏油防掉屑结构、智能对接需求以及厂家特种设备资质逐项核对,帮你一次性选对无尘行车,避免后期验收返工。
![]() 2026-06-11
2026-06-11
湿法设备晶圆搬运易遇腐蚀、滴液、卡涩等痛点,专用洁净伸缩叉通过耐腐材料、导流排液等专项设计,结合实际案例验证,可降低运维成本、提升设备效率与晶圆良率。
![]() 2026-04-15
2026-04-15

全自动定点定位抓取智能起重机
全自动定点定位抓取智能起重机搭载 PLC 闭环定位控制系统,柔性编码带双重检测实现毫米级定点抓取,通用电机低成本智能天车方案,适配钢材仓储、机械加工物料转运,支持旧行车改造,可定制大跨度无人起重设备。
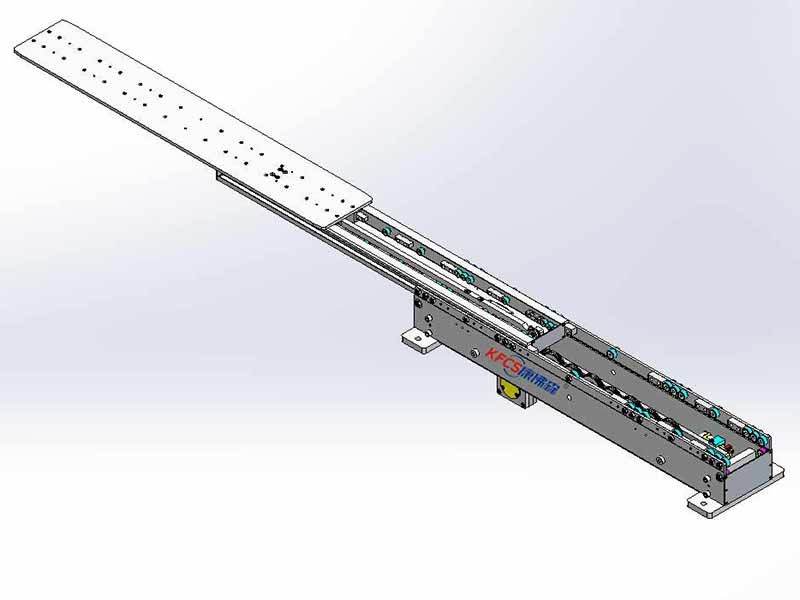
双向伸缩货叉
双向伸缩货叉作为智能仓储核心移载设备,适配堆垛机、RGV穿梭车,支持巷道双侧货物存取,定位精准、承载力强。可满足高密度仓储作业需求,支持非标定制,广泛应用于各行业自动化立体仓库,是仓储高效集约化升级优选设备。
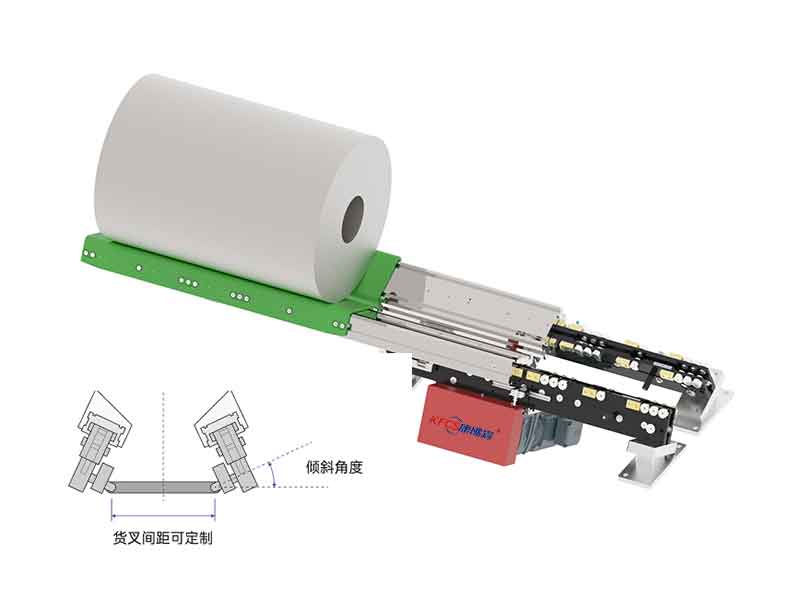
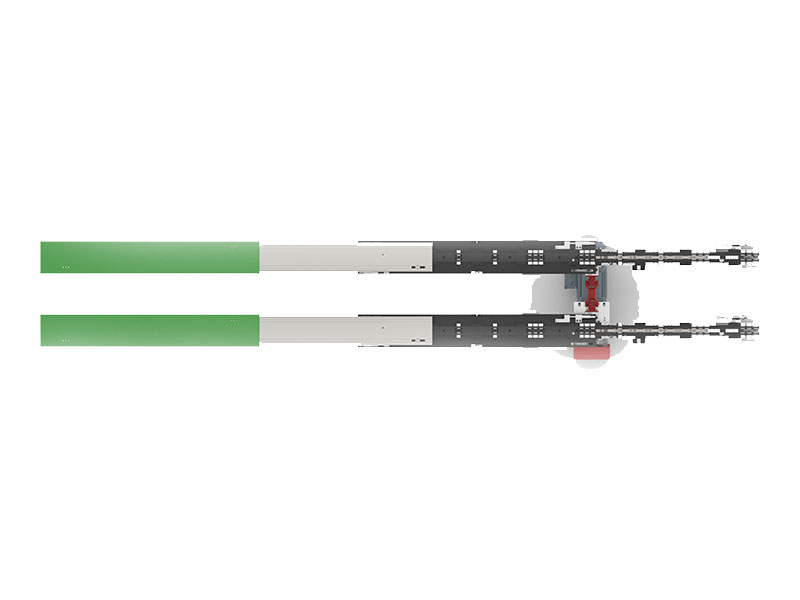
卷料V型伸缩货叉
卷料V型伸缩货叉是自动化仓储核心部件,专为钢卷、铝卷、纸卷等圆柱形卷料设计,安装于堆垛机、AGV或专用叉车,实现立体仓库卷料的自动化存取。
 位置:
位置:



 扫一扫添加微信
扫一扫添加微信