

新闻动态
news
运行路径规划和柔性升降系统的防摇摆定位控制是实现智能起重机运行的必要条件。智能起重机在工作过程中大小车加减速以及负载的提升都会使负载出现来回摆动,,不仅影响起重机作业效率,还会引发事故。目前,常用开环和闭环控制技术实现起重机路径规划和防摇摆控制。
上海智能起重机厂家的开环控制方法主要包括基于输入整形的定位防摇摆控制和基于轨迹规划的定位防摇摆控制。实现路径规划和防摇摆的闭环控制方法有很多,如反馈线性化、增益调度控制、滑模控制、预测控制、模糊控制、 神经网络控制、 无源性 控制等控制方式。

对于障碍物地点固定不变的吊装和搬运环境,采用静态路径规划即可满足要求。但是,当环境中的障碍物不能事先确定或多台智能起重机混合作业时,需要采用动态路径规划的方法在线实时得到安全的路径。吊装的路径规划。近年来,学者们针对起重机的路径规划给出了一些有效的规划算法,如人工势场法、概率路标算法、快速随机生成树算法、遗传算法、蚁群算法等。
随着无线移动通讯技术的发展,上海智能起重机厂家将感应器(陀螺仪、加速度传感器、方位传感器等)安装在吊具或取物装置上,实现基于被吊物品的三维定位、路径规划和防摇摆控制将得到广泛应用。

全自动定点定位抓取智能起重机
全自动定点定位抓取智能起重机搭载 PLC 闭环定位控制系统,柔性编码带双重检测实现毫米级定点抓取,通用电机低成本智能天车方案,适配钢材仓储、机械加工物料转运,支持旧行车改造,可定制大跨度无人起重设备。
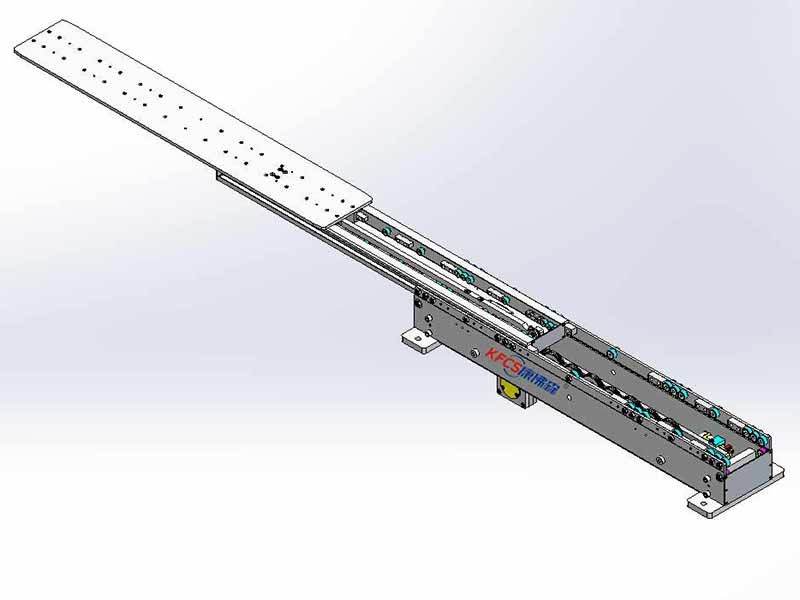
双向伸缩货叉
双向伸缩货叉作为智能仓储核心移载设备,适配堆垛机、RGV穿梭车,支持巷道双侧货物存取,定位精准、承载力强。可满足高密度仓储作业需求,支持非标定制,广泛应用于各行业自动化立体仓库,是仓储高效集约化升级优选设备。
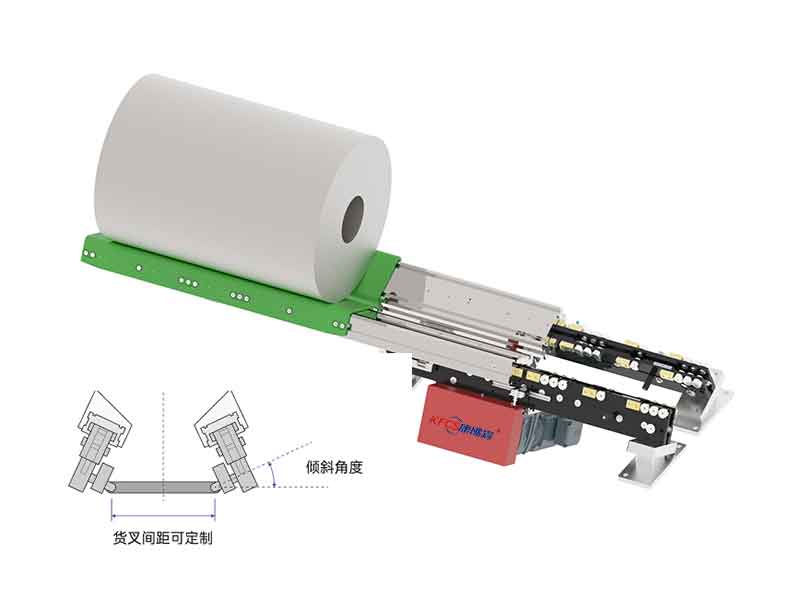
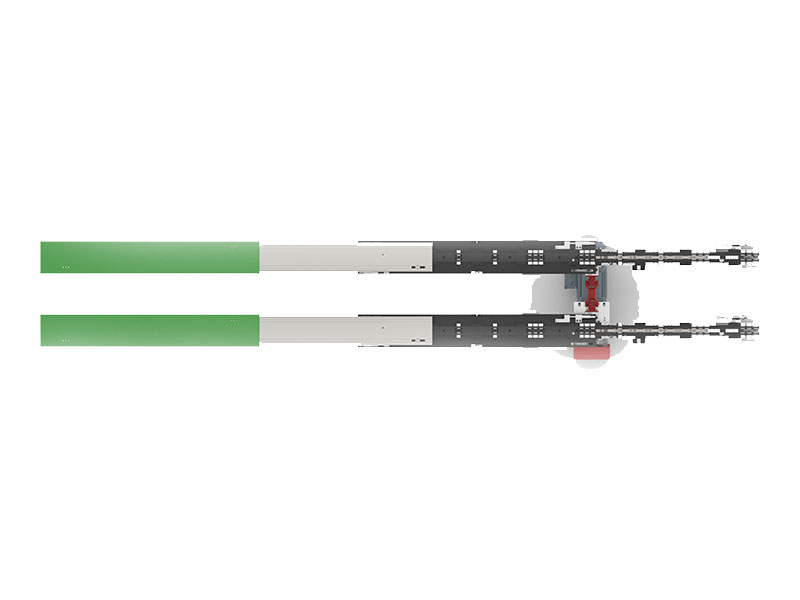
卷料V型伸缩货叉
卷料V型伸缩货叉是自动化仓储核心部件,专为钢卷、铝卷、纸卷等圆柱形卷料设计,安装于堆垛机、AGV或专用叉车,实现立体仓库卷料的自动化存取。
 位置:
位置:



 扫一扫添加微信
扫一扫添加微信